The CSA Propylaea Project
Harrison Eiteljorg, II, 2013. https://doi.org/10.5284/1022574. How to cite using this DOI
Data copyright © Harrison Eiteljorg, II unless otherwise stated
This work is licensed under the ADS Terms of Use and Access.

Primary contact
Harrison
Eiteljorg, II
Center for the Study of Architecture
Box 60
Bryn Mawr
PA 19010
USA
Resource identifiers
- ADS Collection: 1591
- DOI:https://doi.org/10.5284/1022574
- How to cite using this DOI
Final Report, CSA Propylaea Project: Understanding Coordinate Systems
Although some may find this beginning information to be a bit of high-school geometry redux, others may find it more useful while others find it truly necessary. Even if you think you might not need a rehearsal of high-school geometry concepts, this informtion may be useful to describe the way such concepts can be used in CAD programs to create alternate grids for entering or defining data points.
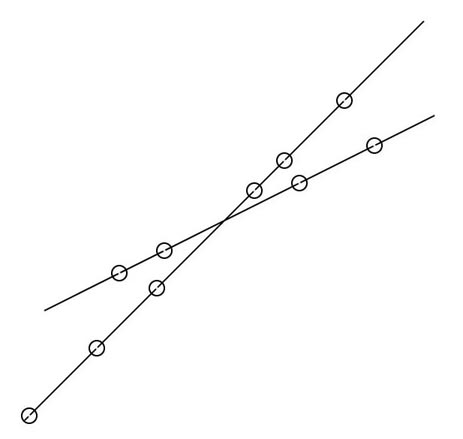
Fig. 1 - Two lines in space, each with points along the line.
Figure 1 shows two lines in space, each with marks to indicate specific points on the lines. How do we define the positions of the points or the slopes of the lines? That seems an easy question, but it requires a kind of leap of faith. We must define a grid (in this case a two-dimensional grid will suffice) to provide a local measurement system. By local I mean simply that the grid is not intended to locate the lines or points in the world/universe at large but simply to provide a system that will allow us to locate the lines and points relative to some standard and, as a result, to one another. So we add a grid as seen in the next figure.
Figure 2 shows the lines with a typical x/y grid for doing geometric operations. We can now see that one of the lines is at a 45-degree angle on the grid, as may have seemed the case; the other is at a more acute angle to the x-axis. They cross at the origin, the 0,0 point. The locations of the points can be determined easily: 16,16; 8,8; 4,4; -9,-9; -17,-17; and -26,-26 for the 45-degree line and 20,10; 10,5; -8,-4; and -14,-7 for the other line -- by reading from the two axes (x-value first, then y). The numbers are always the same for x and y on the line running at 45 degrees.
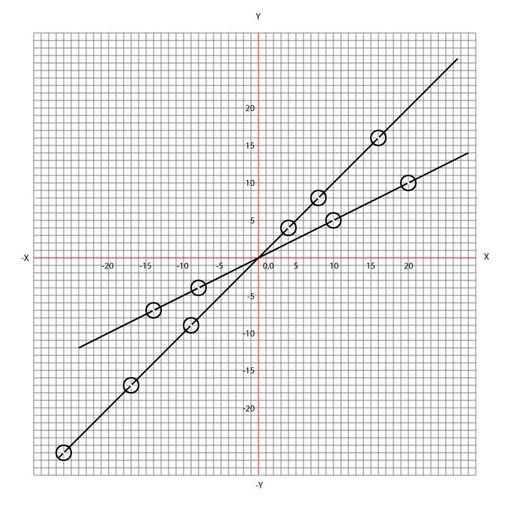
Fig. 2 - A standard x,y grid with axes marked, scales numbered, and two inclined lines with points on them.
Figure 3 shows the same lines with the same points marked on them, but the grid to locate the points has been rotated. The x-axis is now on the same orientation as the 45-degree line. Indeed, the points on that line are now located at 22.6,0; 11.3,0; 5.6,0; -12.7,0; -24.1,0; and -36.8,0; that is, 0 is the y-value for each point. The coordinates for the points on the other line are 21.3,-7.1; 10.6,-3.5; -8.6,2.9; and -14.8,4.9. (The actual points cannot be read with great precision, of course, though they could be calculated with precision.)
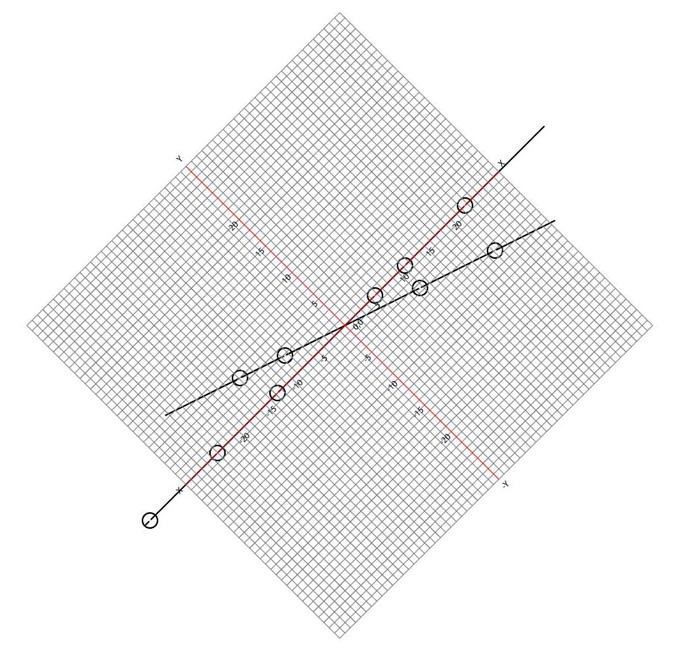
Fig. 3 - A rotated x,y grid with axes marked, scales numbered, and
the inclined lines with points on them remaining.
Note the obvious. The points have not moved. (Figure 4 shows the two grids together, making it clear that the line and points have not moved.) They are in the same position in each version, but the grids with which their positions can be defined are different, making their coordinates in the two grid systems different but not their real positions. This is a critical notion: different grids may be used to define points without changing the locations of the points — and a definition of point locations in one grid system will be as good as a definition in another. The grid system does not determine point locations; it just provides a way to specify those locations according to that grid. Furthermore, a virtually infinite number of grids could be created to define points such as these.
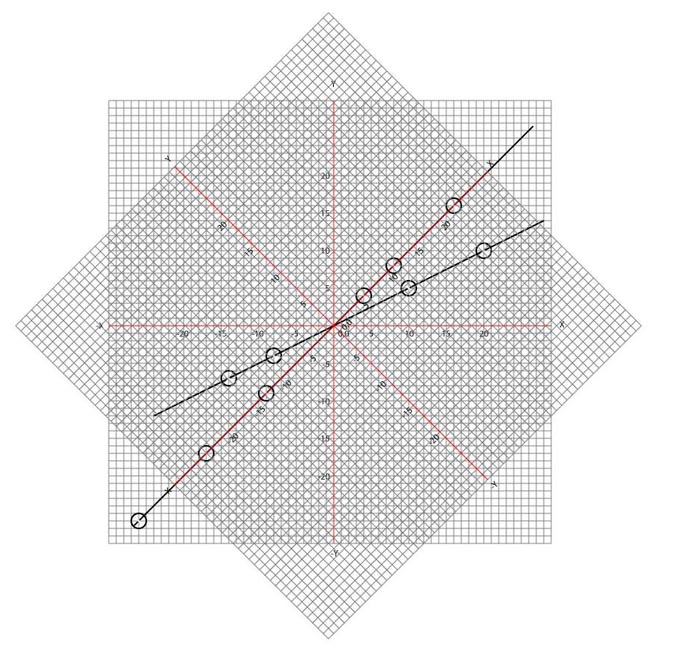
Fig. 4 - The same line with both sets of grids shown.
This is an obvious but important point. Any position may be defined in any number of grid systems. Imagine, for instance, an Olympic soccer stadium. In it every position is marked according to whatever grid is used to lay out the field. The grid, of course, would be metric. If however, that stadium could be made over to house an American football field, the grid would be based upon yards, not meters, and its starting point need not have any relation to the starting point for the soccer field. Any point on the field would remain stationary, of course, but each would be measured with a different unit of measure and from a different starting point in the two systems.
When a surveyor works, he/she will almost surely set up a survey grid following an established north/south, east/west grid and a pre-determined 0,0,0 point of origin, and that is usually to be preferred since it permits new data to be added to existing data more easily. In such a case, the surveyor(s) will back-sight known points and determine from them both the position of the instrument on the ground (in x-, y-, and z-position in CAD parlance; in northing, easting, and elevation in survey terms) and the known direction for true north. Having done that, the surveyor(s) may then specify the direction of north on the surveying instrument and enter the coordinates of its location in the computer program or paper notebook to be used to record sightings and calculate positions of the objects surveyed; the calculations will place the points according to the established grid.
A person making a survey may not be able to work in the actual north/south, east/west of the surveyor's grid at all times; some measurements may be taken by hand with a tape measure and based on some fixed point. If finding the location of a point requires such hand measurement, some way to work out the relationships between the hand-measured points and the grid in use is obviously required. Fortunately, this is rather easy to accomplish using modern CAD programs. There are at least two ways to accomplish this with CAD, one that we might use as a simple approach for a point or two and another to be used where a larger number of points might not align with the surveyor's grid. The first does not require that an explicit alternate grid be used; the second does.
Let us start with the simpler case, using existing survey points to determine the locations of others via geometry.
The figures below show a simple square parking lot being surveyed; its sides are oriented north-south and east-west; so it fits nicely in a standard grid. The 0,0,0 point lies just south and west of the corner of the parking surface. On the square is a diagonally-oriented wall that, of course, does not fit the standard grid. The north and east arrows show the compass points. With them and the 0,0,0 point (and a scale not shown here), it should be possible to survey anything within sight of a total station placed nearby.
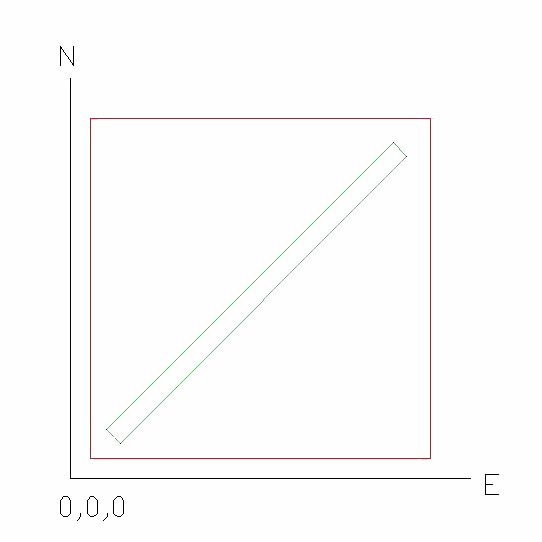
Fig. 5 -- Plan view of the area under survey.
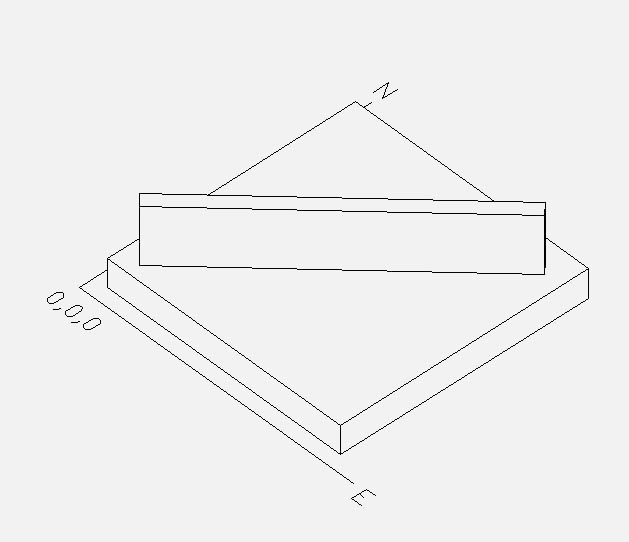
Fig. 6 - A 3D view of Fig. 5.
Not shown in figures 5 or 6, the wall has two marks on it, indicated by the crossing points in the centers of the circles. These points are shown in figure 7. The marks have been measured, not surveyed, as shown in figure 8. The distance from the upper left corner of the wall to the leftmost point has been taken on the horizontal and the vertical (A and B). Similarly, the distance from the first to the second point has been measured both on the horizontal and vertical axes (C and D). This makes good common sense, but these measurements would not help a surveyor, because the measurements are on a plane that it not aligned with the east-west or north-south axes of the grid used by the surveyor.
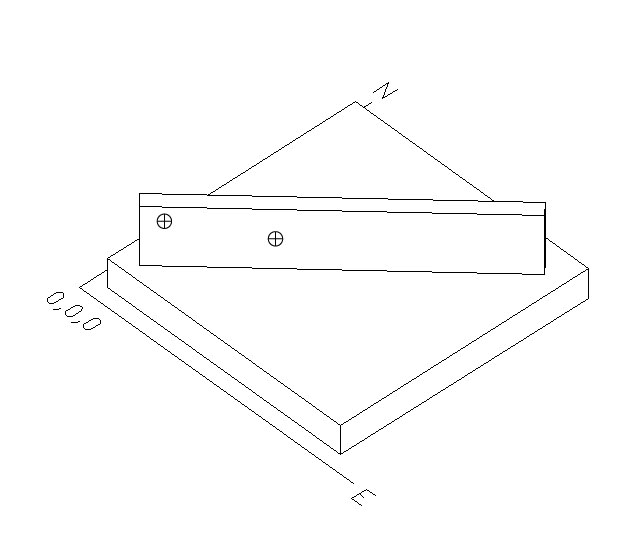
Fig. 7 - The points on the wall for survey.
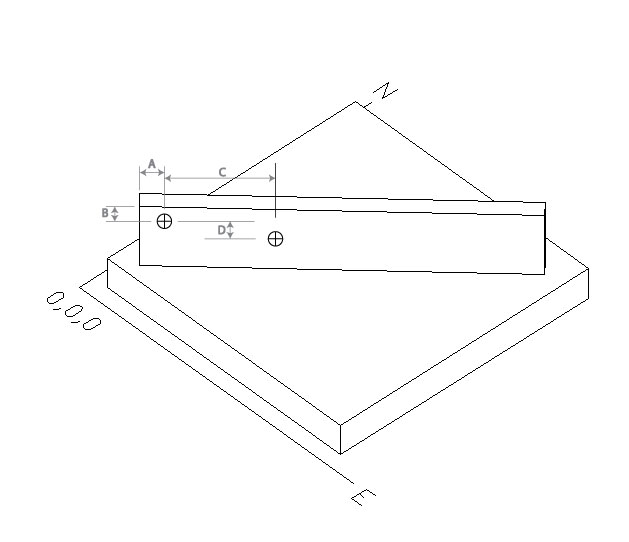
Fig. 8 - The points on the wall for survey with the locating dimensions shown.
Since the wall on which the points exist has been surveyed, the easy way to deal with placing these points into a CAD model in the right place is to construct lines in the existing system, using information available in the form of existing points and dimensions, and let those lines determine the locations of the points being added to the model. Thus, a line beginning at the upper left corner of the wall can be constructed to the upper right corner. (Any CAD program will permit the line to be made horizontal, as it should be here, if the two corners are not at the same elevation.) Then the line may be lowered by the dimension B and shortened to the dimension A to yield the left point — at the right end of the line just constructed. This is easily accomplished with any CAD program.
To find the second point is also quite easy, again in any CAD program. Copy the line just made because it has the right direction; move it so that its starting end is at the first point; move it down by dimension D; change its length to dimension C. Its right end now marks the second point on the wall.
It would, of course, be easier to be able to define the first point by saying it is A to the right and B below the corner and then to say that the second point is C to the right of the first point and D below it. Were there many points measured on the wall, it would be worth taking the time to find an easier method to work in just that way. To find a more efficient method to work here, however, requires that "to the right" to be made meaningful in the grid used. It must mean A distance in the direction of the wall's front surface and horizontal. This can actually be accomplished rather easily in a CAD environment. A CAD technician may simply assign a new grid — a new north/south or east/west axis, a new horizontal plane, and/or a new point of origin (the 0,0,0 point) — giving the CAD system a new, temporary, grid/coordinate system. When that has been done, any operation can use the temporary coordinate system (which can even be retained for use at any future time, reverting to the standard grid in the interim). Thus, we could assign the line of the wall in the figures as the new x-axis, using the vertical as the y-axis; at that point, the face of the wall (assuming it is vertical as it has been drawn here) is the x-y plane for our new grid/coordinate system. The origin of this new grid may be the corner of the wall or any other point the technician wishes to select. The critical matter is that any point on the wall may now be defined as a given distance in the x-, y-, or z-direction from any other point on the wall, because the wall itself defines the x and y axes. Every new point generated, of course, has a set of coordinates (x, y, and z) in the temporary coordinate system. (If it is on the wall, the z-value will be 0.) However, those points will be just as precisely defined in the original grid system as well (as our points were properly defined by two different sets of coordinates in figures 2 and 3). That is, if the CAD technician makes models of new blocks in the temporary grid system required for his/her purposes, the relationships between and among all the CAD entities, no matter the grid/coordinate system used to enter them, are fixed and immutable. So, returning to the original grid/coordinate system simply changes the coordinates of any points but retains the relationships between and among all points in the model. Any point in one coordinate system will exist at the right place in any other grid/coordinate system relative to all other points, but the x-, y-, and z-coordinates will be different. (It should be noted here that rounding errors may yield slight discrepancies in dimensions when grids are changed. I have noted changes of as much as 2 or 3 tenths of a millimeter for one coordinate when points have been moved from one grid to another and back again.)
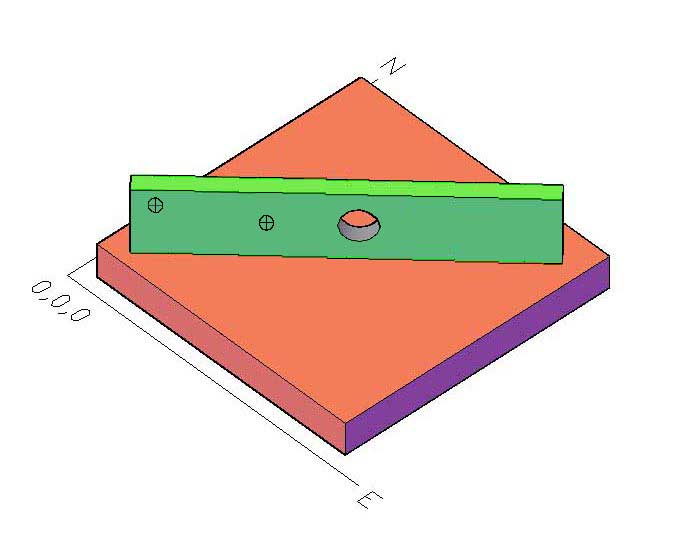
Fig. 9 - This figure shows the wall constructed on the parking lot with a
hole through it as well as the points previously shown. This time we have a
shaded image rather than just line art. Such a hole could only be made by
using an alternate grid/coordinate system (or by knowing all required to make
and manipulate a cylindrical shape very carefully).
Any point in any of these views can be defined in terms of either the North/South, East/West grid/coordinate system used for the initial survey work or in terms of the new grid/coordinate system created as if the wall surface itself were the x-y plane.
The processes involved in making and using alternate coordinate system in AutoCAD are very much harder to explain than to use, and similar processes in other CAD systems exist. The point is simply that using alternate grids/coordinate systems can greatly simplify dealing with data derived from different survey practices and conditions, especially measurements made locally without the aid of a total station or other survey instrument. Similar processes have been used in making the model of the NW wing of the Propylaea; so readers should understand this idea in order to understand fully how the data were manipulated to generate the CAD model of the NW wing.
- Title: "Final Report, CSA Propylaea Project: Understanding Coordinate Systems
- Author: Harrison Eiteljorg, II and the staff of CSA, Box 60, Bryn Mawr, PA 19010, (e-mail: user nicke at (@) the domain csanet.org; tel.: 484-612-5862)
- Original file name: coordsystems.html
- Revision history: Since this document is part of the CSA Propylaea Project Final Report and has been archived with the Archaeology Data Service, changes should not occur. Serious mistakes may be corrected; if so, clear indications of corrections will be included. First posted: 3 August, 2009. The version posted in July of 2010 used smaller images to fit in the new page design. The first four images were re-sized at 75% of the originals at that time. Last updated for Propylaea website (formatting only): July, 2012. Prepared for ADS archival storage June, 2013
- Internet access: This document was first prepared for propylaea.csanet.org, operated by the Center for the Study of Architecture and Harrison Eiteljorg, II. It has been turned over to the Archaeology Data Service for archival preservation.
- Long-term availability: This document or its successors will be maintained for electronic access indefinitely.