
Marine survey techniques
As is evident from a number of reports and projects discussed in the previous section, comparatively little is currently known about the marine historic environment. As with terrestrial archaeology, the marine environment can contain a diverse range of archaeological material from a wide range of periods located both on and beneath the seabed. The archaeology can include in-situ ‘terrestrial’ remains and deposits where sea levels have risen along with more typical archaeology from maritime transport (shipwrecks) and occasionally other vessels such as aircraft. Again, as with terrestrial archaeology, marine archaeology is at much at risk from human action (e.g. dredging and aggregate extraction) as it is from the processes of erosion.
Much of what marine survey – and this guide – aims to explore concerns the seabed and techniques are predominantly focused on assessing and modelling the surface topography, its physical makeup and objects lying on or in it. Data collected from the techniques discussed below, as with many other data types in archaeology, can often form part of a long workflow and data generated from marine survey techniques often forms a part of datasets created in GIS and 3D modelling systems.
This section aims to outline the marine survey data acquisition techniques that are covered in this guide, provide examples of their use together with the types of data generated in each case and possible preservation issues. This section will also look at the likely range of data formats generated and give an indication of their utility in archiving marine archaeological data. The techniques covered here are:
- Bathymetric Survey
- Sidescan Survey
- Sub-bottom Profiling
- Magnetometer Survey
- Positional and Navigational Data
As stated in the introductory section, although a number of other techniques exist, this guide aims to cover only marine survey techniques that generate digital data directly. Survey techniques such as borehole, grab and benthic survey are not covered in the guide and are described elsewhere (e.g. BMAPA & English Heritage 2003, 21-23). Detailed discussion of these techniques, along with metadata requirements are specified in ‘Establishing Best Practice for the Documentation and Dissemination of Marine Biological Data’ (Seeley et al 2008) and by MEDIN.
Bathymetric survey
Bathymetric survey is the measurement of sea depth and usually results in the production of a surface model of the seabed which can then be used to identify archaeological features. Measurements are generated by means of echosounding or Sonar (SOund NAvigation and Ranging), a simple technique often used by maritime archaeologists to map the seabed and to detect wrecks and other features. Sound waves are produced by a device (which can be either mounted to a boat or towed) to detect and locate submerged objects or measure the distance to the floor of a body of water. These devices are often combined with a Global Positioning System (GPS) and other sensors (for recording and correcting for the pitch, roll and yaw of the vessel) to accurately locate features of interest.
Single beam and multibeam
Single beam survey sends a single pulse from a transducer directly downwards and measures the time taken for the reflected energy from the seabed to return. This time is multiplied by the speed of sound in the prevalent water conditions and divided by two to give the depth of a single point. Single beam systems use a narrow vertical pulse and collect data along transect lines and thus have limited coverage with the resolution of the data being determined by footprint size, sampling interval, sampling speed, and distance between survey transects. For a detailed summary of single beam sonar, see the NOAA Coastal Services Center’s ‘Summary View of Single-beam Bathymetry Survey Technique’ document[2]. Sub-bottom profilers (discussed below) are also a type of single beam device.
Multibeam (or Swathe) survey sends out a ‘fan’ of sound waves across the seabed directly beneath and to either side of the survey vessel, producing spot heights for many thousands of points on the seabed as the vessel moves forward. As with single beam survey, data is collected in transects although the swathe of beams allows for an overlap in data collection and thus less gaps in coverage. During multibeam surveys data is also collected on the position (via GPS) and attitude of the survey vessel (e.g. the pitch, roll and yaw, collected via an Inertial Measurement Unit (IMU)) so that data collection remains accurate regardless of the path of the vessel. For a detailed summary of multibeam sonar, see the NOAA Coastal Services Center’s ‘Summary View of Multibeam Survey Technique’ document[3].
Sidescan survey
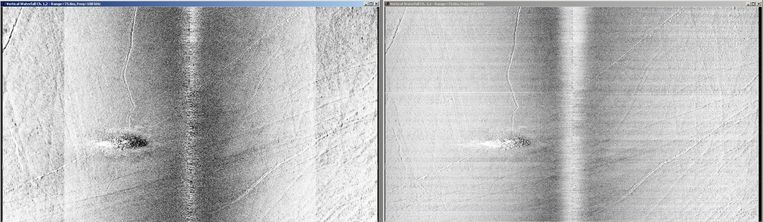
A sidescan echosounder is a device used by maritime archaeologists, particularly in shallow, flat areas where multibeam sonar is less effective[4], to locate submerged structures and artefacts. Whereas the sonar systems described above determine depth, sidescan sonar instead creates an image of the sea floor. The equipment consists of a ‘fish’ that is towed along behind the boat emitting a high frequency pulse of sound. Echoes bounce back from any feature protruding from the sea bed thus recording the location of remains. The sidescan technique is so named because pulses are sent in a wide angle, not only straight down, but also to the sides. Each pulse records a strip of the seabed and, as the boat slowly advances, a bigger picture can be obtained. As well as being a useful means of detecting undiscovered wreck sites, sidescan data can also be used to detect the extents and character of known wrecks.
Acoustic backscatter
In addition to the physical measurement, the way in which the sonar pulse is returned can also indicate the physical properties of materials on the seabed through what is known as ‘acoustic backscatter’. In simple terms, rougher, coarser sediments produce greater backscatter while smoother deposits create less.
Sub-bottom profiling
Sub-bottom profilers are powerful low frequency echosounders that have been developed to provide profiles of the upper layers of the sea bed. Specifically sub-bottom profiling is used by marine archaeologists to detect wrecks and deposits below the surface of the sea floor. The buried extents of known wreck sites can be traced using an acoustic pulse to penetrate the sediment below the sea bed. Echoes from surfaces or the horizons between different geological layers are returned and recorded by the profiler and the sequence of deposition and subsequent erosion can be recorded.
Echosounder/sonar data products
Data collected from techniques such as single and multbeam sonar and sub-bottom profiling allows for the production of accurate 3D terrain and deposit models of the sea floor from which objects and deposits on the seabed can be recorded and quantified. Common products produced from single or multibeam datasets include colour ramped (gridded) images and DEM and 3D models suitable for use in GIS packages. Sub-bottom profiling data is commonly used to produce vertical ‘section’ images of the seabed but can also be used to construct horizontal terrain maps too. Wessex Archaeology used multibeam bathymetry and sub-bottom profiling during the Wrecks on the Seabed project[5] (a Big Data project case study). As well as the raw data itself, 3D terrain models, 3D fly through movies and 2D georeferenced images were also created. The 2D images were then used as a base for site plans and divers were able to use offset and triangulation to record other objects on to the plans.
Magnetometer survey
As with terrestrial magnetometer survey, the marine equivalent is used to detect local variations in the Earth’s magnetic field. These variations are commonly caused by ferromagnetic objects or other magnetic objects on or under the seabed but may also highlight geological features. Magnetometer surveys are usually carried out using a magnetometer modified for marine survey. The magnetometer is commonly contained within a ‘tow-fish’ and towed behind the survey vessel. Terrestrial magnetometry is also discussed throughout the Geophysical Data.
Positional data
As mentioned above, the collection of positional data is a key component of most, if not all, marine survey techniques and positional data is often merged with survey data during the data collection phase. In addition to positional x,y,z data, generally captured using GPS (or Differential GPS), many marine surveys will also capture the vessel attitude (i.e. pitch, roll and yaw) using an IMU device (see multibeam survey above).
Other data types
As highlighted by the VENUS project, marine surveys may also incorporate the capture of other types of data such as digital photography (including photogrammetry) and digital video, both often created by divers or ROVs rather than vessels. These data types will not be dealt with in this guide but instead are addressed in the more general Raster Images and Digital Video chapters in these Guides.
As highlighted previously, data from marine survey can also often be combined or processed with other data in other systems such as GIS. Many of the techniques described above are carried out simultaneously on the same area as part of a single survey and it is not unusual to see this data combined at some stage of the project (or, in the case of the VENUS project, at the stage of data collection).
[2] ‘Summary View of Single-beam Bathymetry Survey Technique’
[3] ‘Summary View of Multibeam Survey Technique’
[4] http://oceanservice.noaa.gov/navigation/hydro/#3
[5] http://www.wessexarch.co.uk/projects/marine/alsf/wrecks_seabed/background.html