
Project planning and requirements
Define project goals. How much field time is available?
Before beginning a project, it is best to identify the scan objectives (what to scan and how many), a list of deliverables, and any project limitations (such as limited field time). While one may wish to scan an object or structure at the highest resolution possible, practical limitations of time and processing power make this unrealistic. Key considerations including project goals and deliverables, data resolution, RGB/intensity data collection, and the use of survey targets need to be determined before entering the field. These issues are discussed in greater detail below.
In general, and significantly where laser scan data is used as the basis for visualisation techniques, data creators should be aware of the principles outlined in The London Charter (2009) and, in particular, Principles 4 to 6 dealing with documentation, sustainability and access.
What is the appropriate point density/data resolution for an object? How does resolution affect file size?
Point density is defined as the average distance between XYZ coordinates in a point cloud. Point density or spacing is also referred to as data resolution. There are two primary considerations when trying to determine the appropriate point density for scanning an object and these include the minimum feature size to detect on the object and the accuracy of the scan system. According to English Heritage, the following formula can be used to determine an appropriate data resolution based on a minimum feature size: Q = 1 – (m/s)
Where Q is the quality of the data (% confidence the object will be detectable), m is the point density on the object and s is the minimum feature size. For example, for an object with a minimum feature size of 6 mm (s) a scan resolution of 12 mm would be unacceptable where 2mm resolution (m) would indicate a 66% confidence (Q) that the feature would be detectable. English Heritage suggests, as a good rule of thumb, that “the point density be at least half the size of the smallest feature”. (English Heritage 2009, 7.2.4).
An additional consideration is the inherent accuracy of the scan system being used. For example, if a sample long range scanner has a tested system accuracy of 6mm, while the scanner can scan at a resolution lower than 6mm, doing so only increases the noise in the data and does not result in a finer measurement. For finer measurements less than 6mm, a system with higher accuracy would therefore be required.
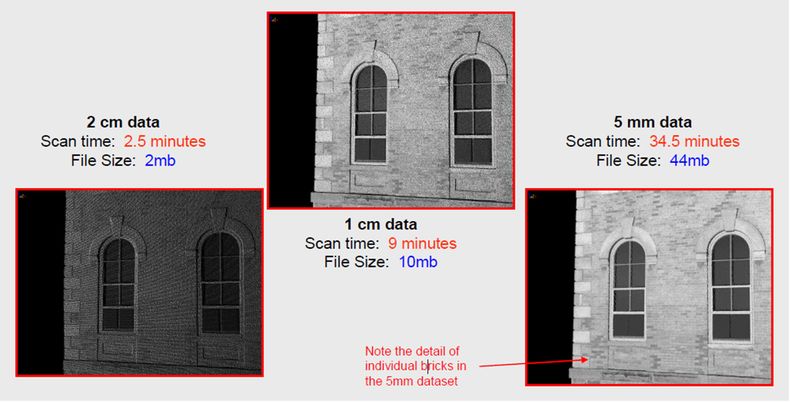
A final consideration with regards to point density is file size and scan time. Again while maxing out data resolution might be tempting, doing so greatly increases data acquisition time and resulting file size. The image below (figure 1) illustrates a comparison of different data resolutions and associated scan times and file sizes for a scan with a sample long range scanner.
Given the factors of field time, data resolution and quantity or size of objects to scan, the best approach is to develop a priority list of objects and appropriate data resolutions that can be modified as circumstances may change in the field. For additional information on point density in laser scanning, please refer to Section 7.2.4 ‘Point Density and Measurement Precision’ in English Heritage’s Metric Survey Specifications for Cultural Heritage (English Heritage 2009).
Will the project include RGB/Color data acquisition? What methods will be used?
If RGB data is acquired in the field, then the methods used for acquisition need to be documented. In general, RGB acquisition and post processing is a very complex process. Many scanners provide the ability to capture RGB data internally while there are also numerous options that allow the user to acquire and map separate digital images onto data (external). In either case, if accurate color acquisition is a priority to the project, the use of an additional lighting system is recommended to provide uniform lighting across a scan scene or object.

This is particularly relevant to scanning smaller objects but the principles of controlled lighting can be applied to large scenes as well. While additional lighting can help in achieving overall good color, if additional lighting is not available, good results can often be achieved by modifying the color data in post processing though the processes can be very time consuming. Before going out into the field, one needs to consider all of the different methods for color acquisition and processing and determine which methods will best achieve the project goals and ensure delivery of the project deliverables.
Will targets be acquired? Will the data be referenced to a local or global coordinate system?
Target acquisition and coordinate system considerations apply primarily to terrestrial scanning of large structures or entire sites. The acquisition of targets can assist in the registration of the scan data and can also be used to tie a point cloud to either a local or global coordinates system. If targets are used, then a sketch plan of the target locations with associated target names is recommended. If targets are used as control points, then the control point file needs to be documented and saved as part of the project. While the use of targets is advisable, they are not required for a scan project. For additional information on target use and survey control, please reference Section 7.2.10 -7.2.11 of the English Heritage document (English Heritage 2009).
What are the intended deliverables for the project?
Finally, identifying a clear project objective and a set of deliverables is recommended at the onset of every project. Having a good idea of what you would like to accomplish can help in prioritizing scan objectives, determining appropriate data resolution, and resolving any conflicts that can arise in the field. Related to project objectives are the intended deliverables for the project. These can range anywhere from the raw point cloud to a completed 3D mesh to a series of CAD drawings represented as plans and elevations. For additional discussion on the different types of deliverables, please see Scan data deliverables below.
Minimum deliverables for archiving
The standard deliverables listed by English Heritage (2007, Section 7.3.1) include the individual raw scans, the final registered point cloud, and all associated metadata elements including the project metadata, scan metadata, and registration metadata. These will continue to be the minimum requirements for archiving scan datasets. Providing that a site or object is surveyed correctly and completely, the original registered point cloud acts as digital replica to the original object and contains a wealth of information on its own. The registered point cloud can be used to extract precise measurements and for visualization purposes and it can also be used as a starting point in creating additional project deliverables.
Additional Products
If additional products are made from the original registered point cloud, it is also strongly advised to archive the final product as well as the interim dataset used in its creation.
Creating deliverables beyond the original registered point cloud can involve a lot of complex processing. It is impossible to document and summarize every detail from processing operations and variations between software make it difficult to assign preset values for the most common processing operations. For example, a mesh smoothing algorithm in one software may allow the user to identify specific numeric values for smoothing radius and smoothing tolerance while the same operation in another software may offer low, medium, and high preset smoothing parameters. Therefore the metadata elements suggested for additional scan deliverables are minimal. Instead we emphasize that, for all products generated beyond the original registered point cloud, the ‘interim level datasets’ used to create the product also are archived.
- For a polygonal mesh for example, the interim level dataset would be the original registered point cloud that has had additional editing (overlap reduction, etc.) to prepare the point cloud for meshing.
- For a set of cross sections, the interim level dataset could be the original registered point cloud or a polygonal mesh file.
The interim dataset is important because it is the essential link between the original registered point cloud and the derived product and completes the processing pipeline from beginning to end. This is important for assessing a product’s validity and for understanding the processes used to create the final product and how these may or may not have deviated from the original dataset. If the coordinate system is also edited in processing, the user will need to archive any additional transformation matrices. These are important for guaranteeing that the final product, the interim dataset, and the original point cloud can all be overlain on to one another for comparability and assessment.